404 Altair 系统级建模与仿真应用_v2023
Altair 系统级建模与仿真应用
Altair 系统建模仿真方案
Altair 数学与系统建模分析平台
COMPOSE Twin Activate PSIM Embed
机电
液压
控制
系统集成
用于数学计算、数据分析的编程开发环境

Altair Compose :一站式的数学计算应用环境
Altair Compose :多种编程语言及 Python 库支持
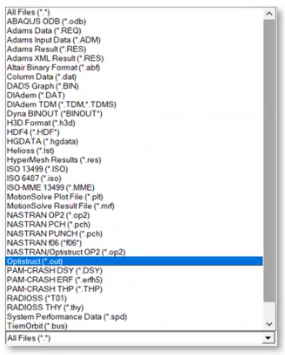
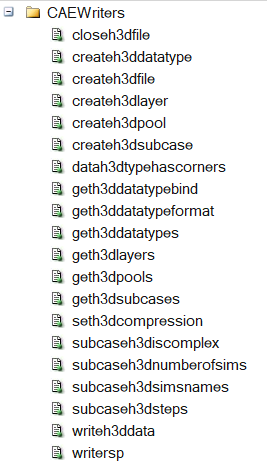
Altair Compose 应用于 CAE/Test 流程自动化
数据提取转换过程
无缝 CAE 处理自动化流程
Savings
Altair Compose 应用于 CAE/Test 流程自动化


Altair Twin Activate TM : 多学科系统建模与集成平台
0D to 1D to 3D
优化
通讯协议 (TCP/IP, UDP, MQTT, SERIAL)

面向多学科系统建模的统一集成的环境

支持多种建模语言的混合建模应用
连续系统和离散系统的混合建模
基于信号的模型和基于物理的模型的混合建模
1 D 系统与 3D 有限元模型联合仿真应用
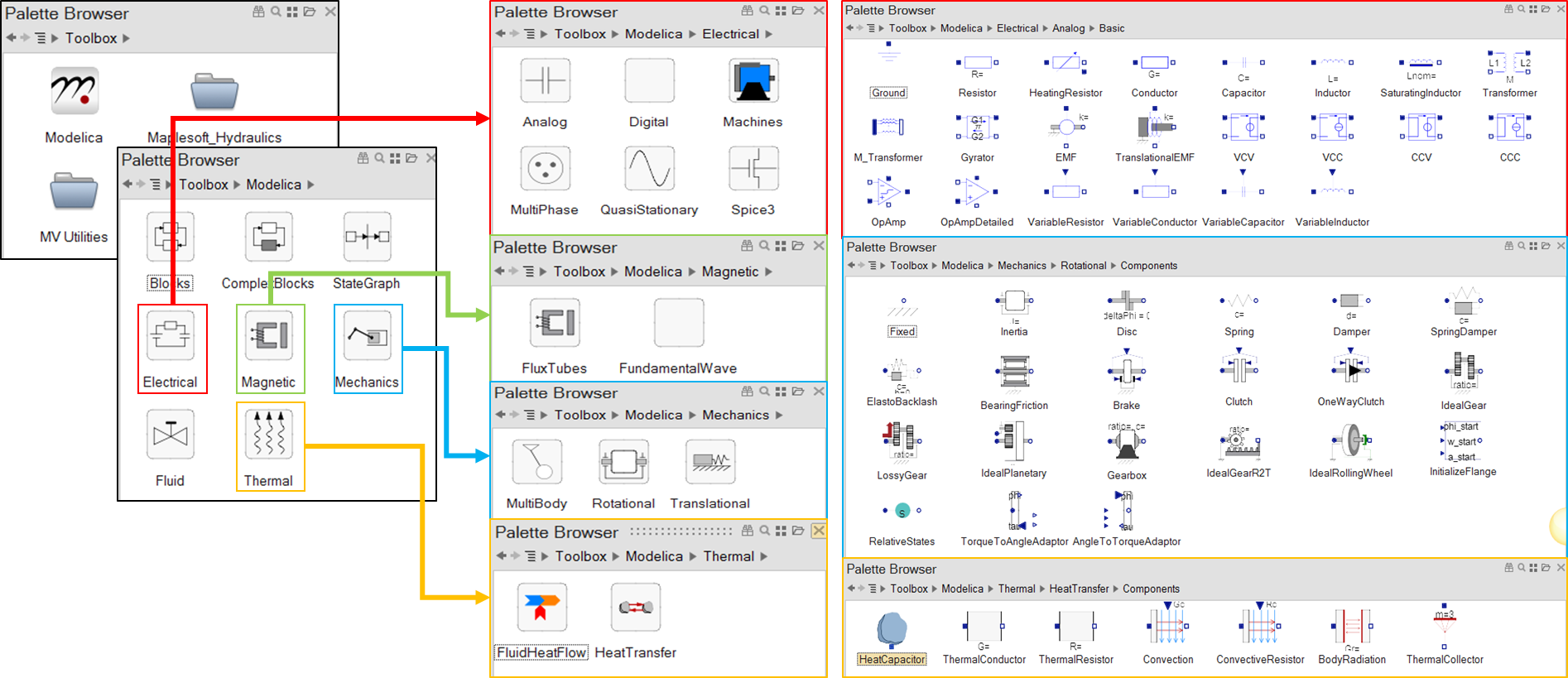
基于 Modelica 的机电物理器件建模
Twin Activate 原生支持基于 Modelica 语言的物理器件建模,包含 1000+ 的 Modelica 标准库( MSL 3.2.3 ),支持电气、热流、磁、机械等学科,同时支持用户自定义 Modelica 模型。
Twin Activate 中的 Modelica 编译器由 Maplesoft™ 提供。

内嵌液压模型库
基于 Modelica 的液压模型库
高质量模型
从 DSHplus 库( Fluidon )派生的组件
适应 Modelica 语言的要求
经过 DSHplus 模拟进行验证
易于使用:
完全集成于 Activate
Symbols 遵循 ISO 1219
参数化尽可能简单
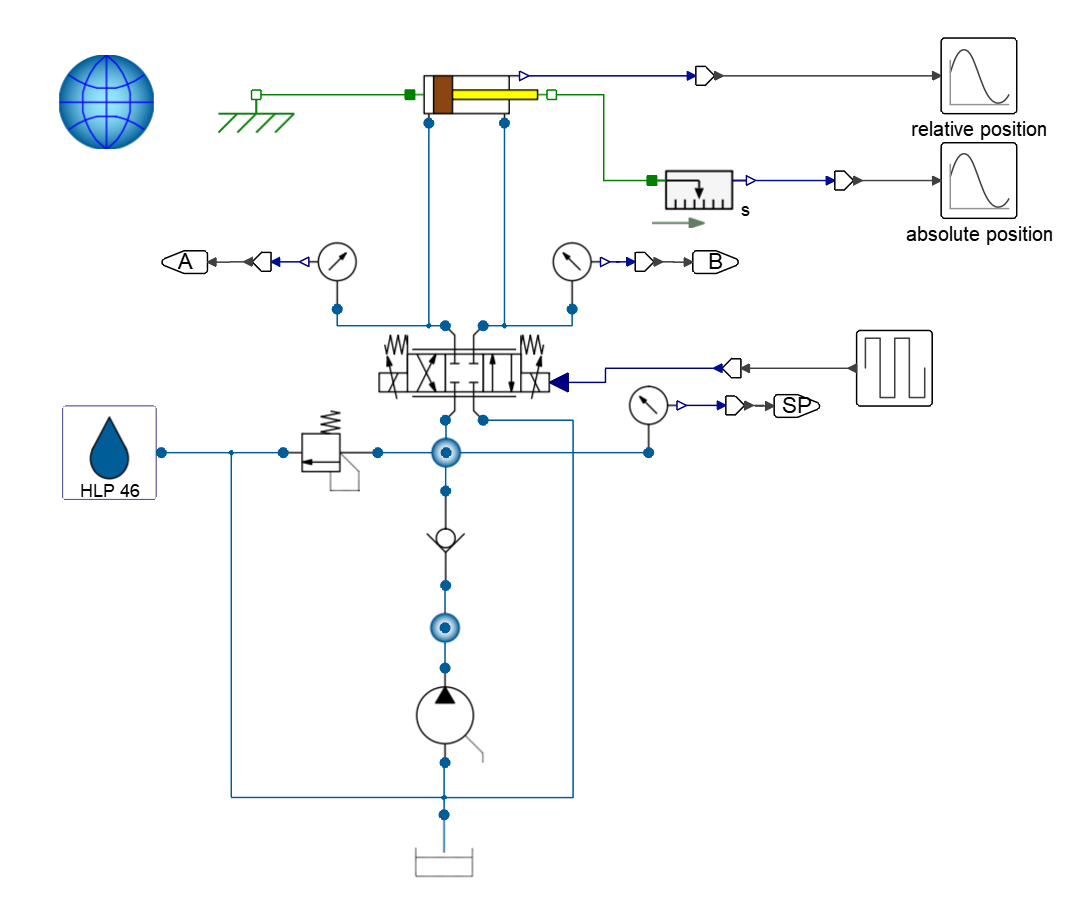
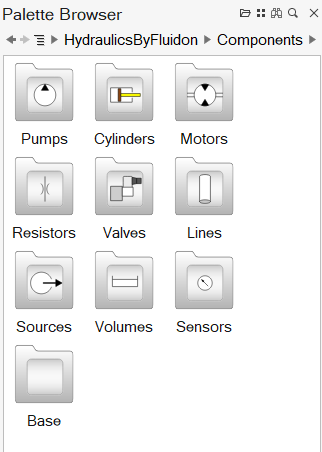
液压模型库
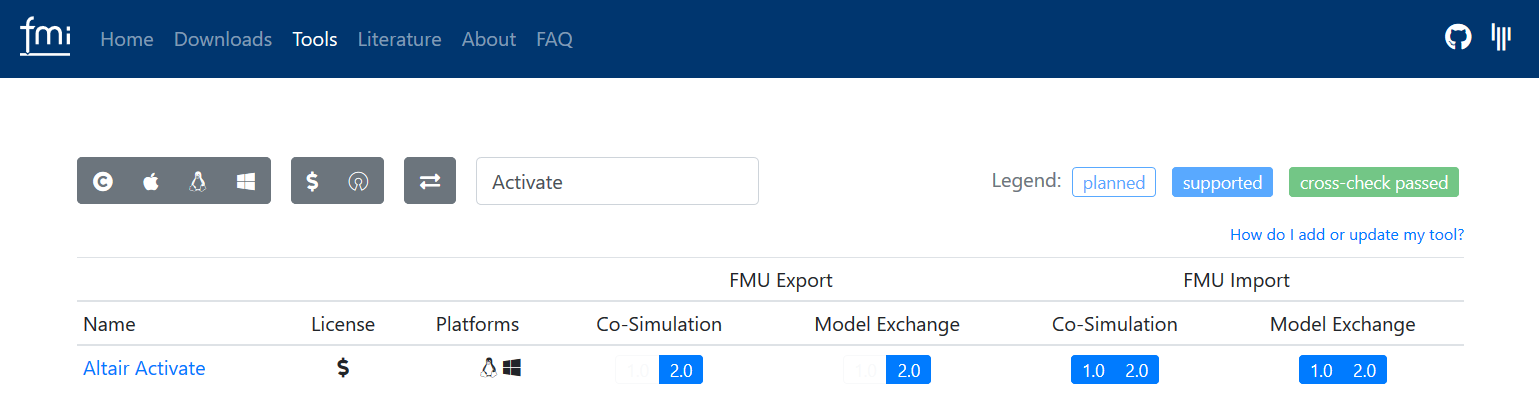
模型交互及联合仿真接口
Functional Mock-up Interface (FMI) 是独立于工具的用于模型交互和动态模型联合仿真的标准格式
Twin Activate 支持导入和导出 Functional Mock-up Unit (FMU)

机电系统 1D-3D 联合仿真
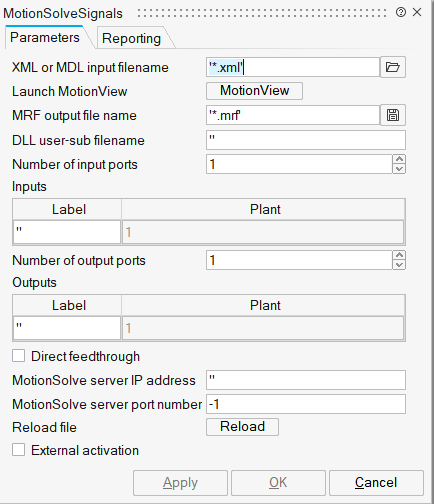
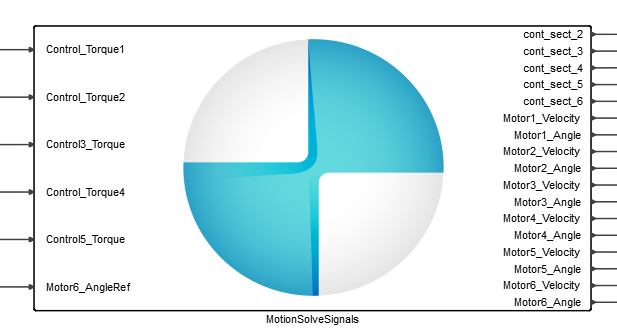
多体动力学联合仿真设置
Altair TwinActivate®
Co-Simulation
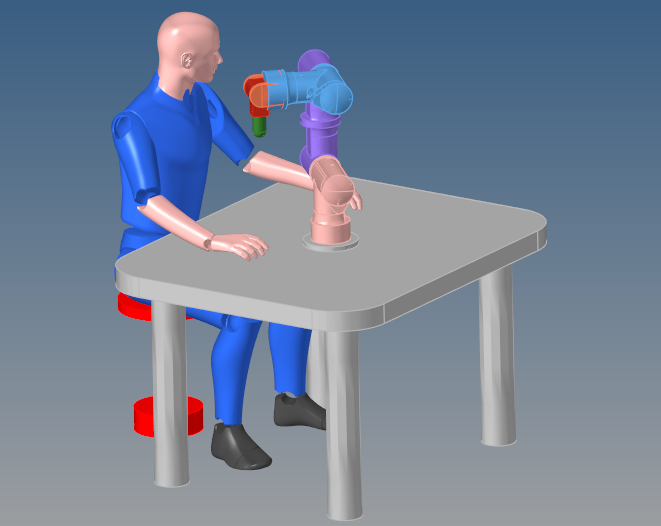

机电系统 1D-3D 联合仿真
车辆控制器模型在 Activate 中创建,并输出为 FMU ,导入 MotionView 中执行包含控制的车辆动力学仿真分析。
* 直接采用 Activate- MotionSolve 联合仿真也可实现同样的仿真分析。

Altair PSIM :电力电子及电机驱动系统分析设计专业工具
仿真
实施
TI F28x 系列
设计
Power Converter & Control Loop Design
MCU 硬件
设计套件
Power Supply
EMI
Motor Control
HEV
Activate/Embed
Flux/ FluxMotor
PollEx SPICE*
SimLab *
Matlab /Simulink
JMAG/JMAG-RT
LTspice
Target
TI MCU
PIL
PE-Expert4
ModelSim
ModCoupler
3 rd -party
Software
FMI
* Coming soon
电源设计 / 功率变换
Power Supply
电机驱动
Motor Drive
代码生成
Code-gen
联合仿真
Co-simulation






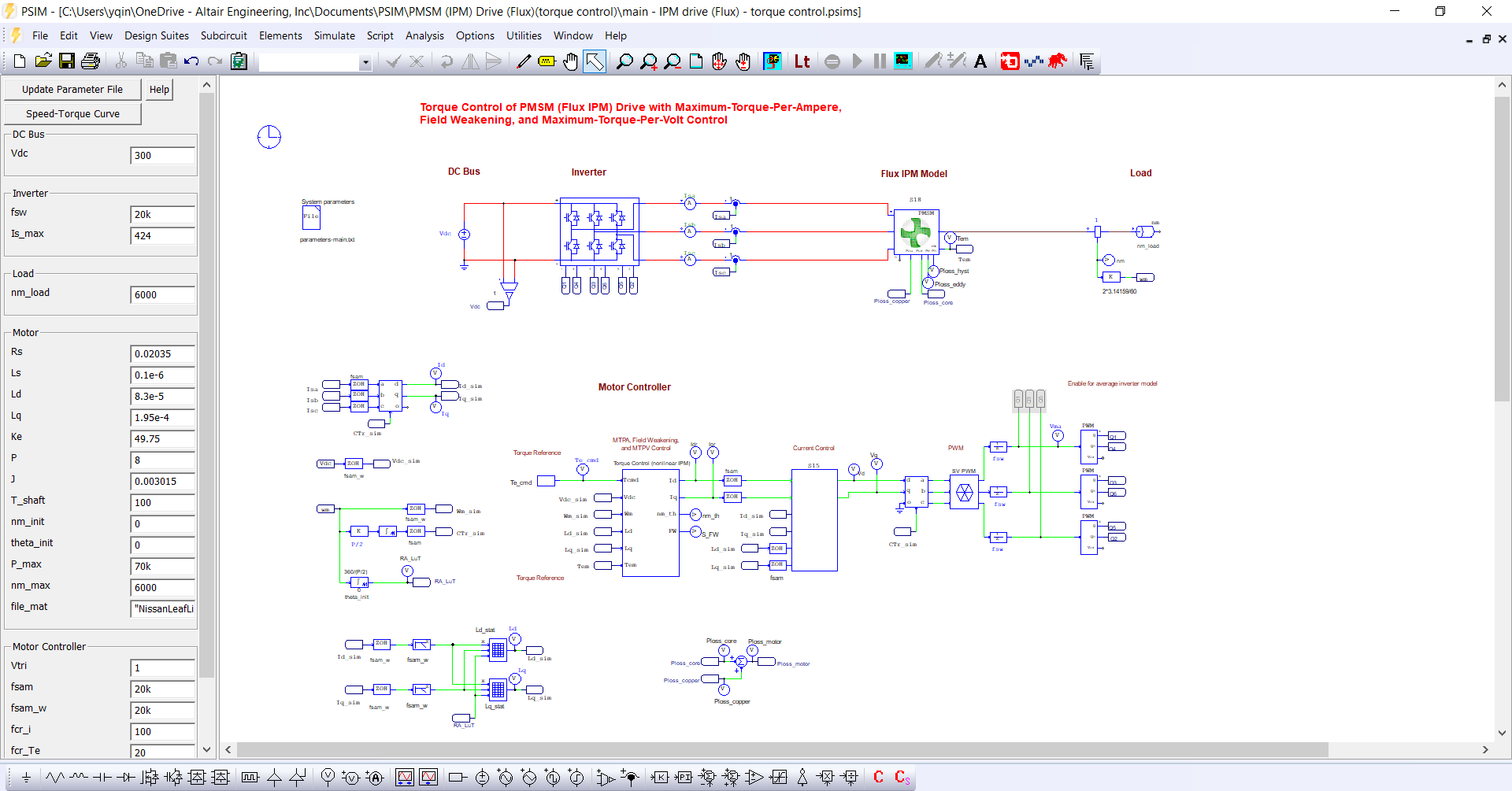
PSIM :电机驱动系统快速设计

Altair EMBED
Altair Embed: 可视化的嵌入式系统开发环境
Altair Embed 是一种基于框图的应用工具 ,用于
通过框图表述的仿真模型及方程求解(线性、非线性、离散、连续及任意组合)
基于任意仿真模型的 C 代码自动生成 (生成的 C 代码称为 AutoCodeGen 模型 ). AutoCodeGen 模型 几乎不需要手动编写代码。
AutoCodeGen 模型 用于在微控制器( MCU )上运行 ( 称为 Targets ). Embed 支持 1200+ 硬件类型,包括 Arduino, Raspberry Pi, T I , 以及 ST Micro 系列 .
AutoCodeGen 模型 和 PC 端通过 Hotlink 进行实时数据收发, Hotlink 是 Embed 提供的一种高速的双向通信链接,支持软件在环( SIL )、处理器在环( PIL )和硬件在环( HIL )
Embed 也支持 PC 在环 操作:这种方式下, PC 端模型按实时运行 * ,可用于数据采集或闭环控制,支持下列通信方式 ** : (1) 通用 I/O 板,( 2 ) OPC 服务,( 3 ) MQTT ,( 4 )串口

仿真 (SIM)
Controller : 在电脑端 Embed 中运行框图模型
Motor & Converter: 电机框图模型以及变换器平均电压信号模型( AVS )
联合仿真 (COSIM)
Controller : 运行与 Embed 中的框图模型
Motor & Converter: 电机模型和开关变换器模型运行于 PSIM 或 Activate
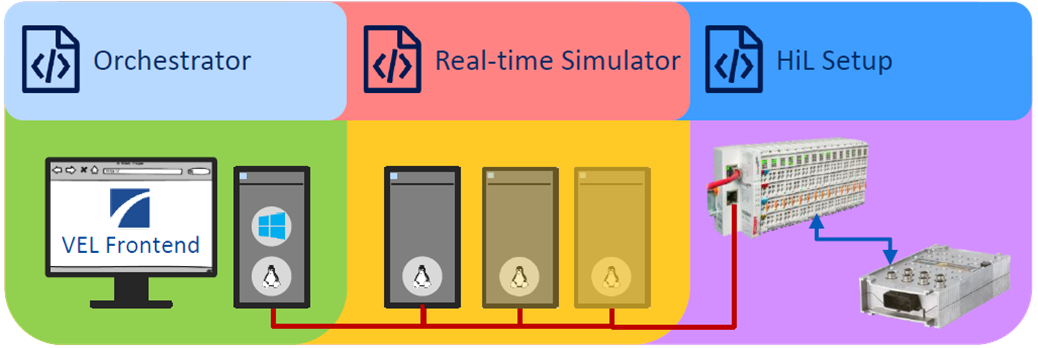
硬件在环 (HIL)
Controller : 固件运行于 MCU 硬件,与电机及变换器的通信通过 MCU 外围硬件直接通信( ADC, PWM, GPIO,… )
Motor & Converter: 实物电机及变换器
HIL Control & Data Collection: HotLink 用于调试、高速数据采集、交互式调整控制器增益、设定值等 …
为工程师提供了在验证阶段早期根据需求持续全面测试设计的能力,从而缩短开发时间,减少反复迭代,减少缺陷漏失。
Embed 支持全阶段开发工具链
Embed – 驱动开发全阶段工具链
处理器在环 (PIL)
Controller : 固件运行于 MCU 硬件,通过非实时同步 HotLink 与电机及变换器模型通信
Motor & Converter: 电机及变换器模型使用 Embed 中的框图模型和平均电压信号模型( AVS )

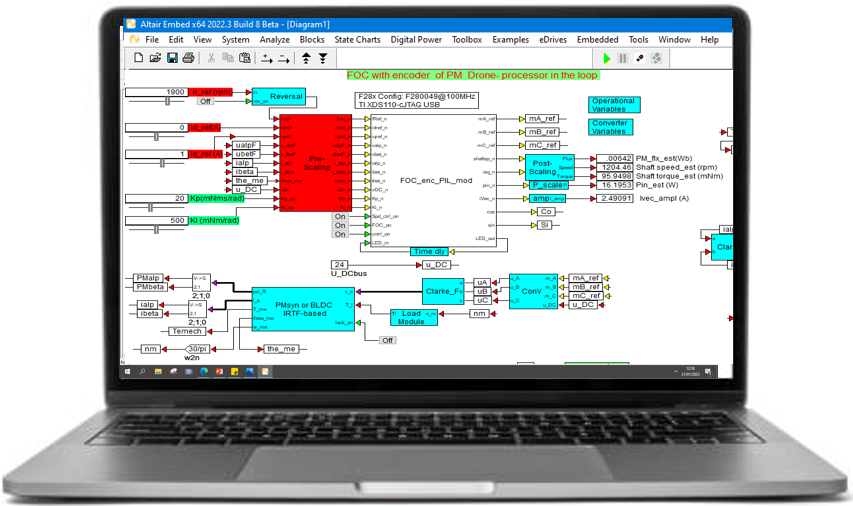
电机驱动控制示例 : 仿真( SIM )
仿真 (SIM)
Controller : 在电脑端 Embed 中运行框图模型
Motor & Converter: 电机框图模型以及变换器平均电压信号模型( AVS )
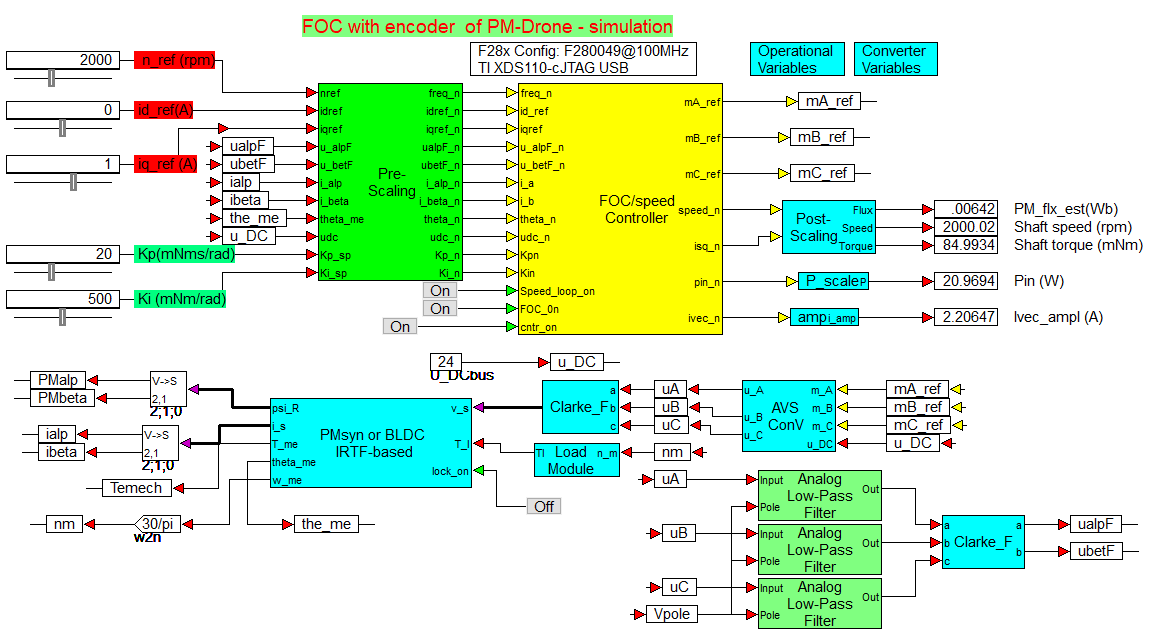

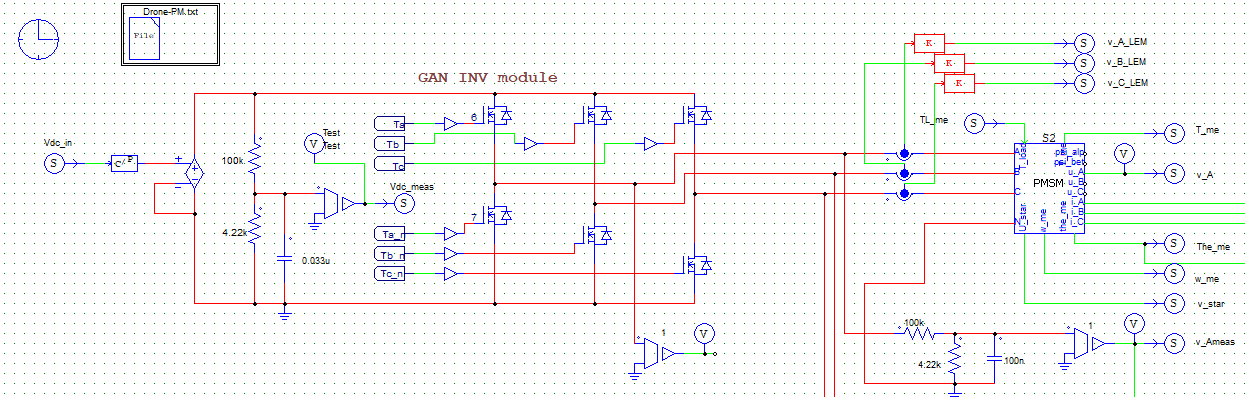
框图模型 : Controller (SIM or PIL), Switching Converter and PMSM in PSIM with load and Encoder
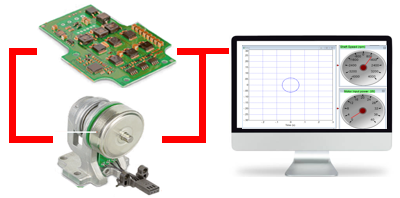
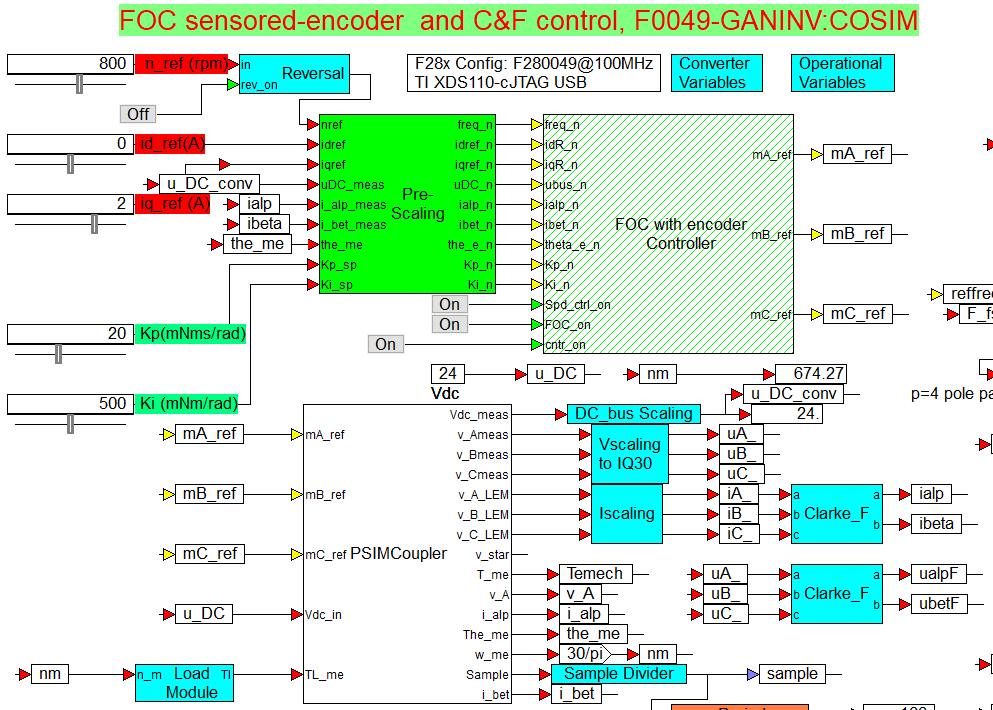
电机驱动控制示例 : 联合仿真( COSIM )
联合仿真 (COSIM)
Controller : 运行与 Embed 中的框图模型
Motor & Converter: 电机模型和开关变换器模型运行于 PSIM 或 Activate
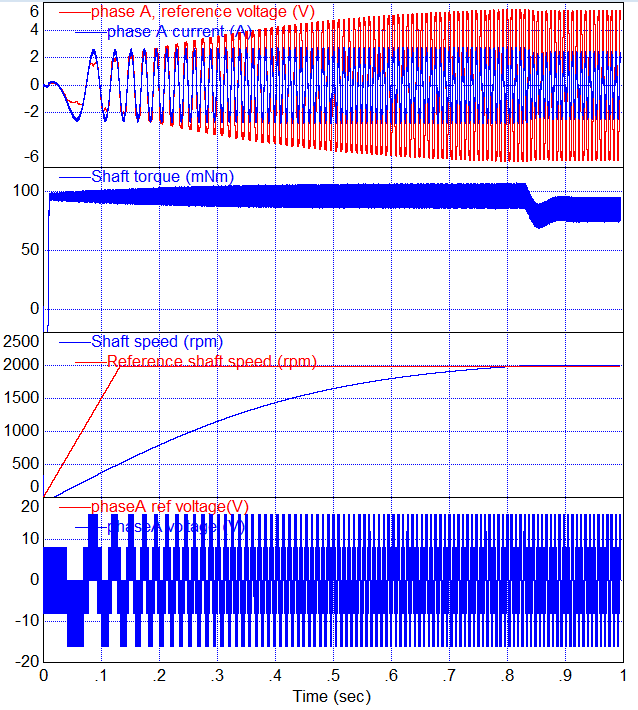
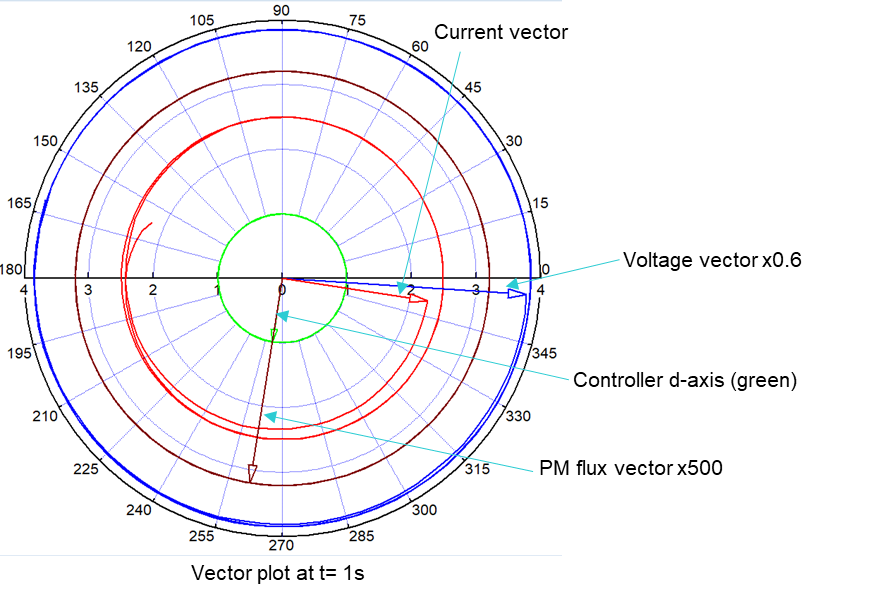
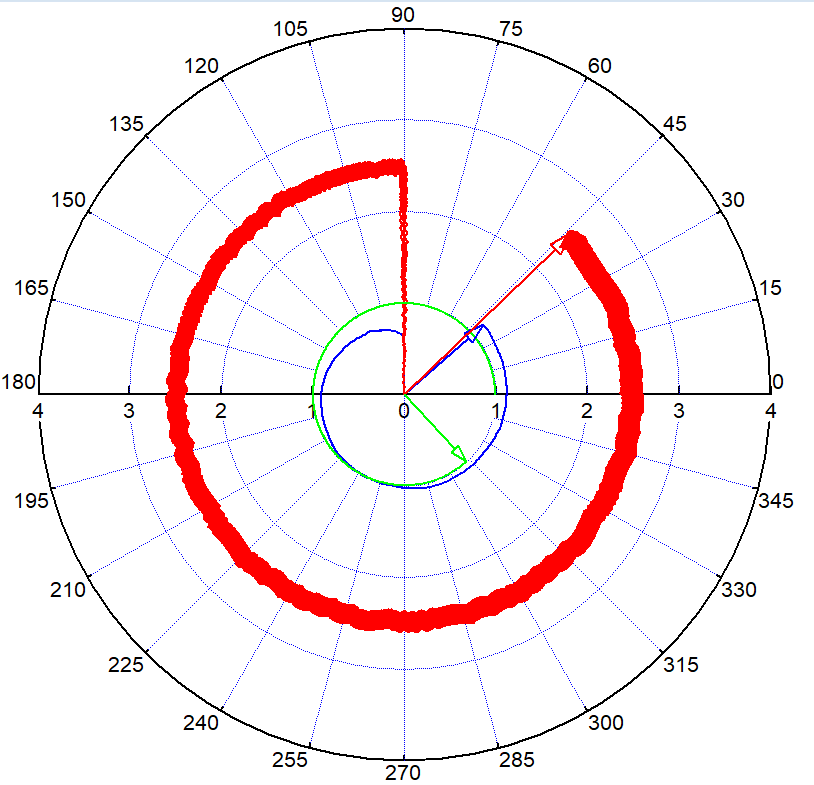
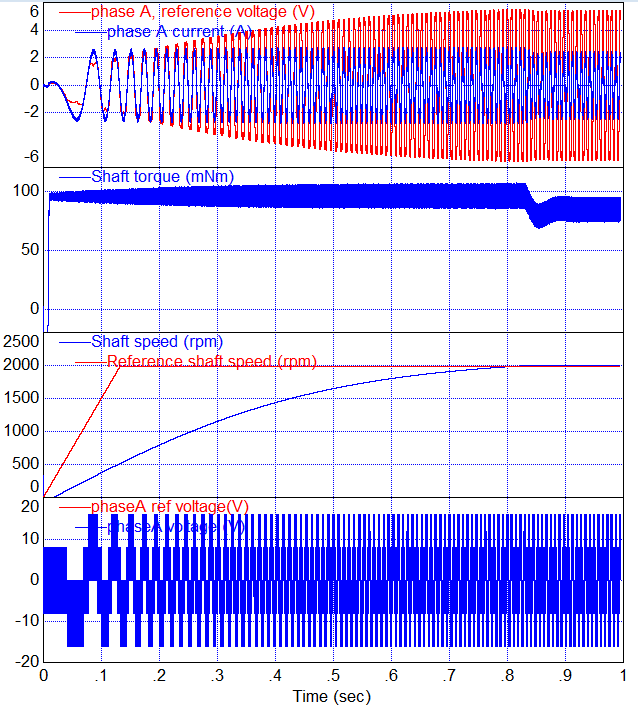
结果 : Sensored FOC with speed control
电机驱动控制示例 : 联合仿真( COSIM )
Current vector
Controller d-axis
Voltage vector x0.6
Time plot t=0 1 s
Vector plot at t= 0.078s
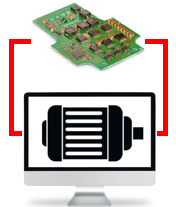
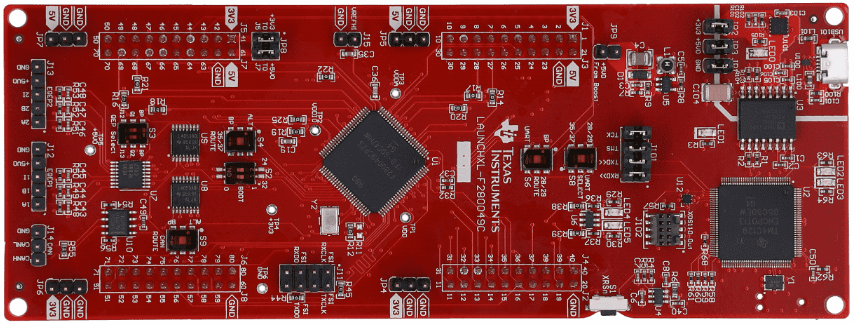
电机驱动控制示例 : 处理器在环( PIL )
HotLink in circuit debugger – 用于非实时通信同步
F280048C target MCU
Tools/ CodeGen
创建 F280048C 硬件固件
Target Interface Block
代替控制器框图模型,并指向运行于 F280048C 的固件
处理器在环 (PIL)
Controller : 固件运行于 MCU 硬件,通过非实时同步 HotLink 与电机及变换器模型通信
Motor & Converter: 电机及变换器模型使用 Embed 中的框图模型和平均电压信号模型( AVS )
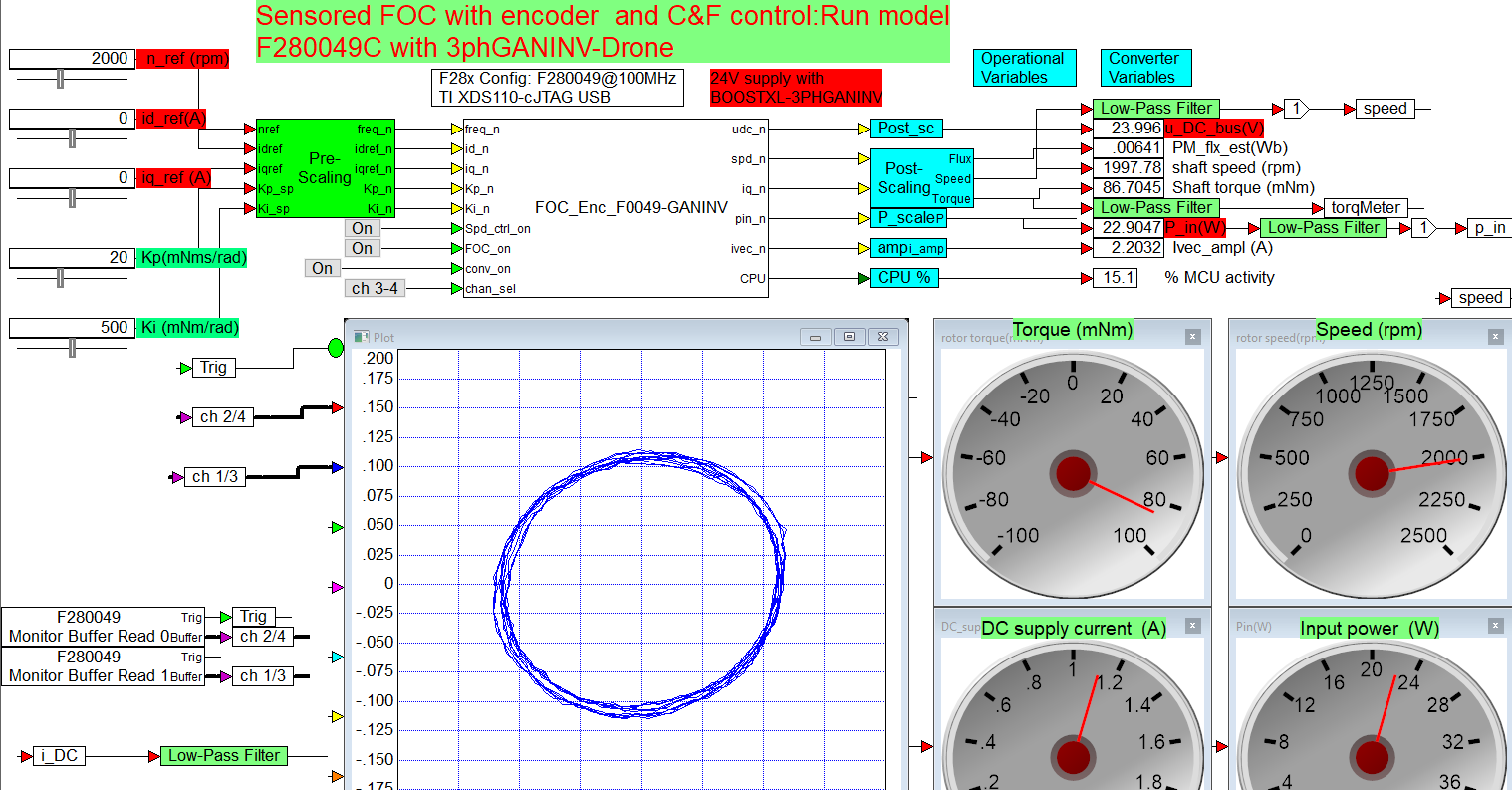
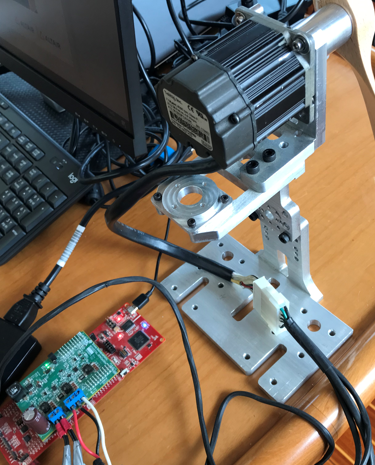
电机驱动控制示例 : 硬件在环( HIL )
HIL Control & Data Collection:
在 Embed 中进行控制点、增益调参等设置。通过 Embed / Monitor Buffers 进行高速数据采集及可视化
Controller, Motor, Converter:
实物硬件
HotLink in circuit debugger – 实时控制及高速数据采集
硬件在环 (HIL)
Controller : 固件运行于 MCU 硬件,与电机及变换器的通信通过 MCU 外围硬件直接通信( ADC, PWM, GPIO,… )
Motor & Converter: 电机与变换器实物
HIL Control & Data Collection: HotLink 用于调试、高速数据采集、交互式调整控制器增益、设定值等 …
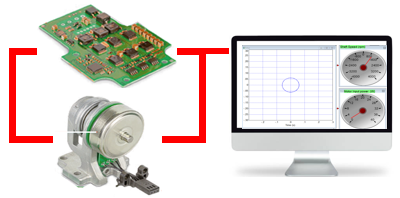
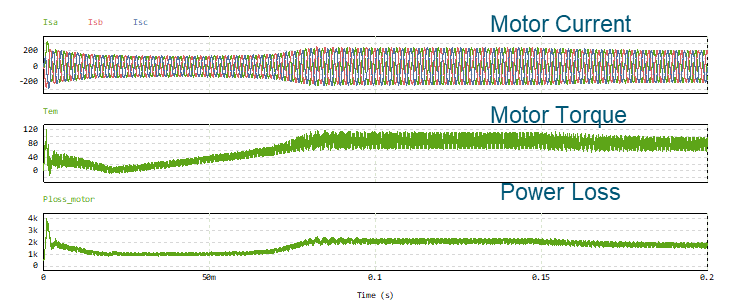
电机驱动控制示例 : 硬件在环( HIL )
在 PC 端进行高速数据采集及可视化,用于显示电流矢量轨迹(缩放因子 20 )或电压矢量轨迹
数字显示:直流母线电压、永磁磁通、转速 / 转矩、输入功率和电流矢量幅值
控制设定,增益调参,以及通过主机的其他设置,用于控制:转速、 dq 轴电流、速度控制器增益和可选转矩 / 速度控制
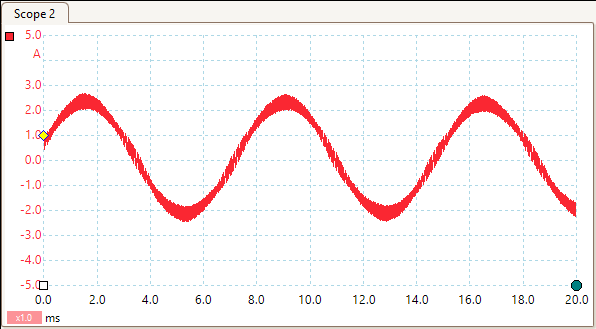
通过示波器和电流探针测量相电流